内容提要
一项由俄罗斯多家科研机构联合完成的最新研究表明,量子退火(Quantum Annealing)技术首次被成功应用于解决机器人运动控制中的核心问题:逆运动学(Inverse Kinematics, IK)。
该成果标志着量子计算在机器人学领域从理论验证迈向实际应用的关键一步,为复杂机械臂运动规划和高维控制问题提供了全新的解决思路。
这项研究由 Q Deep、喀山英诺波利斯大学(Innopolis University)人工智能研究中心、莫斯科物理技术学院(MIPT)、斯科尔科沃科技学院(Skoltech)、华侨大学、俄罗斯人工智能研究院(AIRI) 等机构共同完成,论文发表在《Scientific Reports》期刊,题为《Quantum Annealing for Inverse Kinematics in Robotics》。
01 从经典算法到量子求解
在机器人控制中,逆运动学问题用于确定机械臂每个关节的角度,使末端执行器能精确到达目标位置。
虽然对于某些特定结构的机器人可以得到解析解,但在多数情况下,这一问题是非凸的、多解的,需要数值优化算法来求解。
传统的求解方法包括基于梯度的局部优化(如 SQP、TRAC-IK 等)或基于混合整数规划(MICP)的全局优化。前者依赖良好的初始值,易陷入局部极小;后者虽然能给出全局最优解,但计算复杂度随变量数迅速上升,在高维实时控制中几乎不可用。
与此同时,量子计算的出现为复杂优化问题提供了新的范式。量子退火机(如 D-Wave 系统)能够在物理层面上通过“量子隧穿”效应在能量景观中跳出局部极小值,寻找近似全局最优解。
这一特性与逆运动学问题的本质高度契合,两者都属于典型的非凸优化。因此,研究团队提出:能否将机器人逆运动学重新表述成可由量子退火直接求解的形式?
02 核心思路:将几何问题转化为量子优化
研究团队首次提出了一个“IK→QUBO”量子化求解流程,将逆运动学(Inverse Kinematics, IK)问题转换为二次无约束二值优化模型(QUBO)。
具体做法包括三步:
· 角度离散化(Linear Binary Approximation, LBA)
每个关节角度被分为若干离散样本,并用一组二进制变量表示。
· 独热约束(One-hot Constraint)
每个关节角度块中仅允许一个变量取值为 1,确保每个关节仅选择一个角度。
· QUBO 目标函数构建与惩罚项设计
将末端位置误差平方项转化为二次形式,并加入适度的“大 M 惩罚项”确保约束成立。
这样,原本连续的几何优化问题被重构为二进制优化问题,可直接映射到 D-Wave 的量子硬件上执行。
研究人员随后在 D-Wave 的 Pegasus 与 Zephyr 拓扑架构上完成嵌入,利用真实量子退火器求解,并成功重构出机械臂的可行关节角度解。这标志着机器人逆运动学问题首次被完整实现于真实量子硬件上。
03 创新亮点
这项研究的独特价值不仅在于“让量子计算第一次走进机器人运动控制”,更在于它建立了一套可复现、可测量、可拓展的量子优化求解框架。
与以往仅停留在理论层面的探索不同,该团队完成了从数学建模到量子硬件实测的全链路闭环,使“量子机器人控制”从概念走向现实。
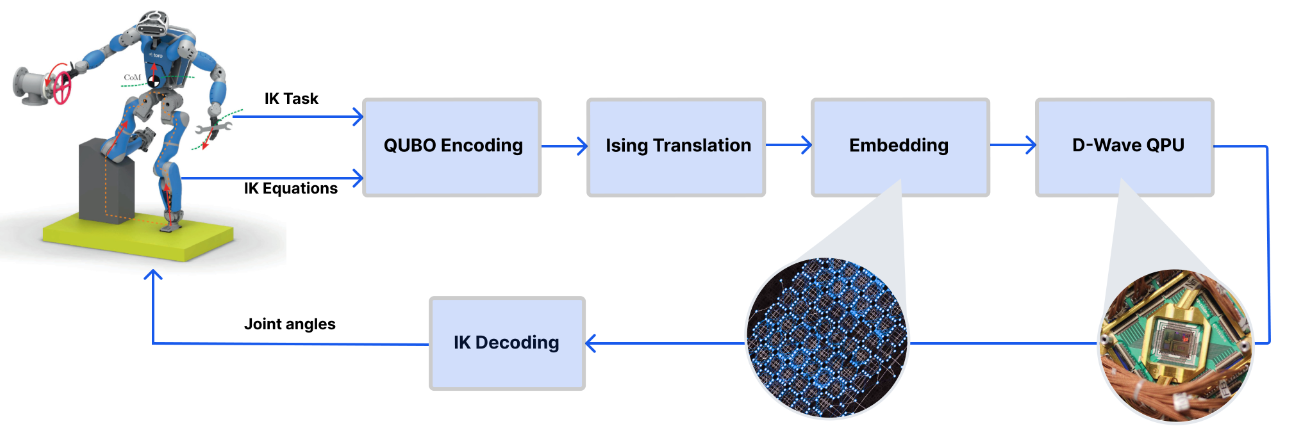
量子退火求解逆运动学的工作流程:图源论文
论文的创新性主要体现在:
首个端到端的 IK→QUBO 量子求解流程
实现了将机器人逆运动学方程完整映射为 QUBO 模型的过程。整个量子退火求解逆运动学的工作流程包括五个阶段(如上图所示):
(1)QUBO 构建:将各关节角度方程离散化为二进制变量,通过线性二进制近似(LBA)计算正弦与余弦值,添加独热约束(One-hot constraint),并构建末端误差最小化的二次能量函数。
(2)Ising 模型转换:将 QUBO 映射为等价的 Ising 哈密顿量,以便在量子硬件上执行。二进制变量对应自旋状态(±1),偏置与耦合项分别代表外场与相互作用能。
(3)量子嵌入与初始化:针对 D-Wave 的 Pegasus 与 Zephyr 拓扑结构,采用不同的嵌入策略,将逻辑变量映射到物理量子比特网络中。此时系统初始化为量子叠加态,表示所有角度组合的并行搜索。
(4)量子退火求解:在退火过程中,横场逐渐减弱、纵场增强,系统在量子隧穿作用下跳出局部最小值并趋向全局最低能态,对应于最优关节角配置。
(5)解码与验证:量子处理器输出自旋状态后,研究人员将其解码为具体角度,并通过正向运动学验证末端误差是否满足精度要求。
严谨的性能评估体系
引入了“时间到解”(Time-To-Solution, TTS)指标,用于公平评估不同量子与经典求解器的性能。
这一标准化指标不仅考虑算法本身的运算时间,还纳入了成功率与误差容忍度,使得量子求解结果具有统计意义上的可比较性,为未来跨硬件评估奠定基础。
惩罚项设计与精度控制
通过规范化惩罚项设计,避免了传统大 M 方法导致的目标函数失真,确保量子解在逆运动学空间中的物理可行性。
高效的量子嵌入策略分析
研究者系统比较了两种量子嵌入策略,即 Global Embedding 与 Clique Embedding,在两种硬件拓扑(Pegasus 与 Zephyr)上的资源占用与访问时间,为后续量子硬件设计提供了实证参考。
量子-经典混合求解实现加速突破
团队借助 D-Wave Hybrid Solver,将量子退火与经典局部搜索结合,在大规模问题上实现显著加速。
可以看出,这项工作不仅仅是一次技术实验,而是一次框架级创新,凸显出量子计算并非只能解决抽象的数学优化问题,而是可以与真实的物理系统(例如机器人控制)深度融合。
04 实验结果
研究团队以双连杆平面机械臂为实验对象,每个关节角度离散为 5-10 个样本。
结果显示:
· 在 Zephyr 拓扑下的全局嵌入(Global Embedding)使用的量子比特最少,QPU 访问时间最短,是最优方案;
· 混合量子–经典求解器在处理 900×900 规模的 QUBO 实例时,比传统模拟退火法(SA)快约 30 倍;
· 尽管量子退火器在高维问题中会受到“集成控制误差(ICE)”影响,导致能量略高于理论最优值,但其输出的关节角度仍完全符合逆运动学约束,末端误差在离散精度范围内。
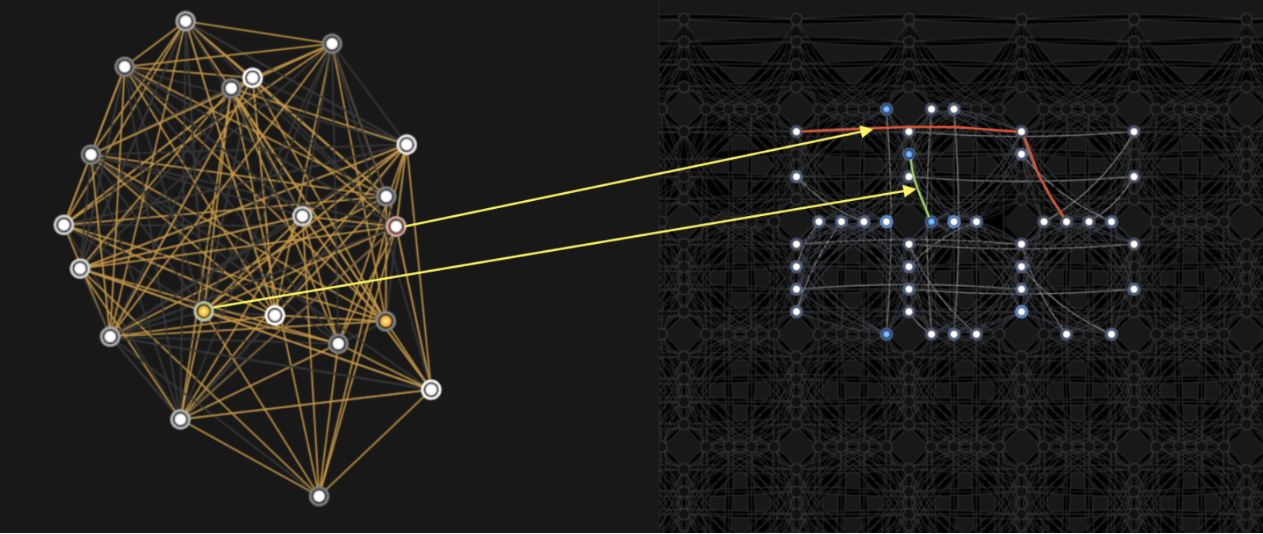
将双连杆逆运动学(Two-Linked IK)问题图映射到量子退火器硬件架构的过程:图源论文
与此同时,经典算法 PROTES 在同样规模下失效,无法输出可行解。
这些结果表明,量子退火不仅能保持解的正确性,还在某些复杂场景下实现了可测量的速度提升。
05 应用前景
虽然该研究尚处于概念验证阶段,尚未超越连续优化算法的速度和精度,但其科学意义十分重大:它首次在真实量子硬件上完成了从机器人控制问题到可执行量子模型的闭环验证。
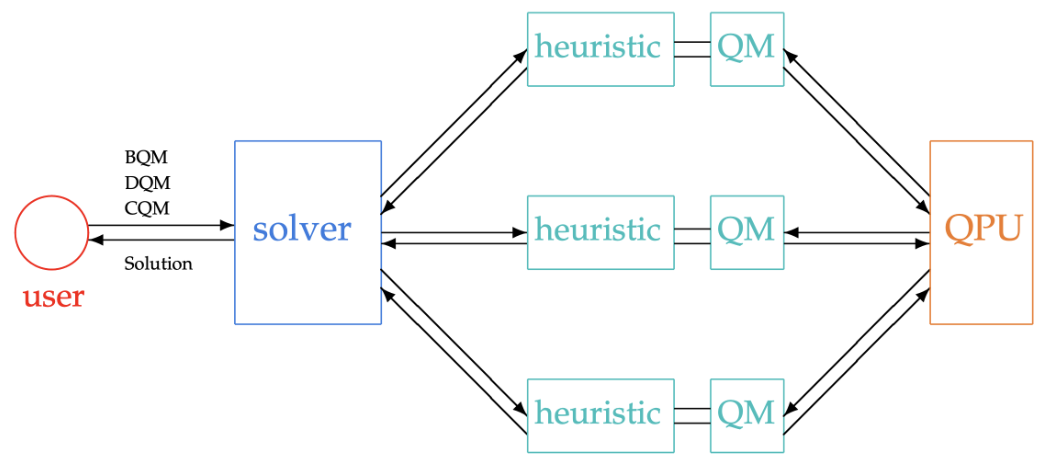
D-Wave 混合求解器结构图:图源论文
未来,研究团队计划进一步优化以下方向:
· 开发适应量子硬件的高效嵌入与误差修正策略;
· 推进高阶无约束二值优化 HUBO→QUBO 转换,以支持多自由度、三维及冗余机器人系统;
· 探索量子计算在机器人路径规划、协作控制与实时感知中的潜在应用。
正如论文通讯作者 Hadi Salloum 所言,这项研究并非为了证明量子退火优于传统算法,而是为机器人学提供了一个量化、可复现的量子计算基线。它表明,随着量子硬件能力的提升,机器人运动控制的某些核心问题可能率先实现量子加速。
在 Q Deep 与多家顶尖科研机构的合作推动下,这项成果为量子计算与机器人学的交叉研究奠定了重要基础,也为未来智能制造、自动化系统和太空机器人控制的量子化应用,开启了全新的可能性。
Reference:
1、https://theaiinsider.tech/2026/01/19/russian-scientists-solve-robot-motion-problems-with-quantum-annealers/
2、https://www.nature.com/articles/s41598-025-34346-z
文章转载自微信公众号:量子前哨
原文链接:https://mp.weixin.qq.com/s/4MN735X_7OCRaSeX4ShaHA |