《Hybrid Quantum-Classical Multi-Agent Pathfinding》提出 QP 和 QCP 两种混合量子 - 经典多智能体路径规划算法。算法通过冲突图建模转化 QUBO 问题,100 智能体场景中,QP-ILP 版本路径成本较经典算法 LNS2 低 5%-15%,QP-QUBO 版本多数场景性能超越 LaCAM * 等主流算法,冲突图分解使 QUBO 可行解数量提升 30%,为大规模多智能体协同提供高效方案。
在城市无人机配送、仓库机器人协同、自动驾驶编队等场景中,多智能体路径规划(MAPF)是核心技术 —— 需要为数十甚至数百个智能体规划无碰撞路径,同时最小化总行程成本。但随着智能体数量增加,这个问题会变成 NP 难问题,传统算法要么陷入 “算力爆炸”,要么只能给出次优解。来自波恩大学与弗劳恩霍夫研究所的团队提出混合量子 - 经典 MAPF 算法,将路径规划转化为量子可解的 QUBO 问题,结合分支 - 切割 - 定价框架,在真实量子硬件上实现了对传统算法的超越,为大规模多智能体协同打开了新思路。
一、MAPF 的 “经典困境”:多智能体避撞难在哪?
多智能体路径规划的核心目标是 “无冲突 + 最优路径”,但实际应用中面临三大挑战:
冲突类型复杂:智能体可能在同一时间占据同一节点(顶点冲突),或双向穿越同一条边(边冲突),需要同时规避两种碰撞;
解空间爆炸:每个智能体的路径选择随时间步呈指数增长,100 个智能体的解空间规模足以让超级计算机望而却步;
算法效率瓶颈:经典最优算法(如冲突搜索 CBS、分支 - 切割 - 定价 BCP)在智能体数量超过 50 后,往往因算力限制无法在有效时间内给出解;次优算法(如 LNS2、LaCAM*)虽快但路径成本偏高,难以满足工程需求。
以城市无人机配送为例,未来数千架无人机同时飞行,传统算法根本无法实时规划无碰撞航线,这也是制约无人机大规模应用的关键瓶颈。
二、量子算法的 “破局思路”:QUBO + 分支 - 切割 - 定价
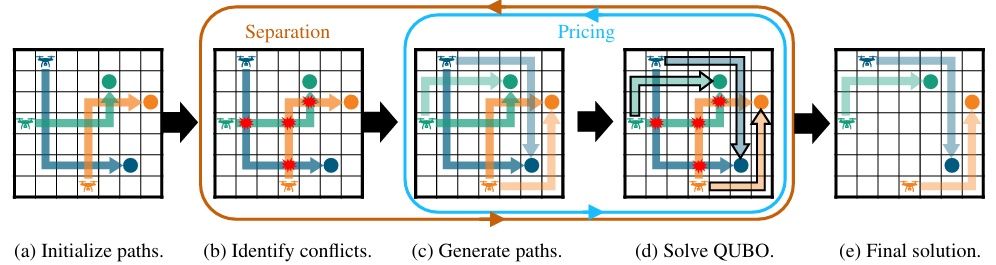
图1 混合量子 - 经典 MAPF 算法流程
研究团队的核心创新,是将复杂的 MAPF 问题拆解为 “量子可解的子问题”,通过混合框架兼顾最优性与效率:
2.1 问题建模:路径选择转化为二进制优化
首先将 MAPF 转化为整数线性规划(ILP)问题,核心变量与约束如下:
决策变量:用二进制变量zp∈{0,1}表示智能体是否选择路径p,zp=1代表选择该路径;
目标函数:最小化所有智能体的路径总成本,即min∑a∈A∑p∈Pacpzp(cp为路径p的成本,Pa为智能体a的所有可能路径);
核心约束:每个智能体必须选择且仅选择一条路径(∑p∈Pazp=1);同一节点 / 边在同一时间只能被一个智能体占用(避免冲突)。
2.2 量子适配:ILP 转 QUBO 问题
量子计算机擅长解决二次无约束二进制优化(QUBO)问题,其标准形式为:
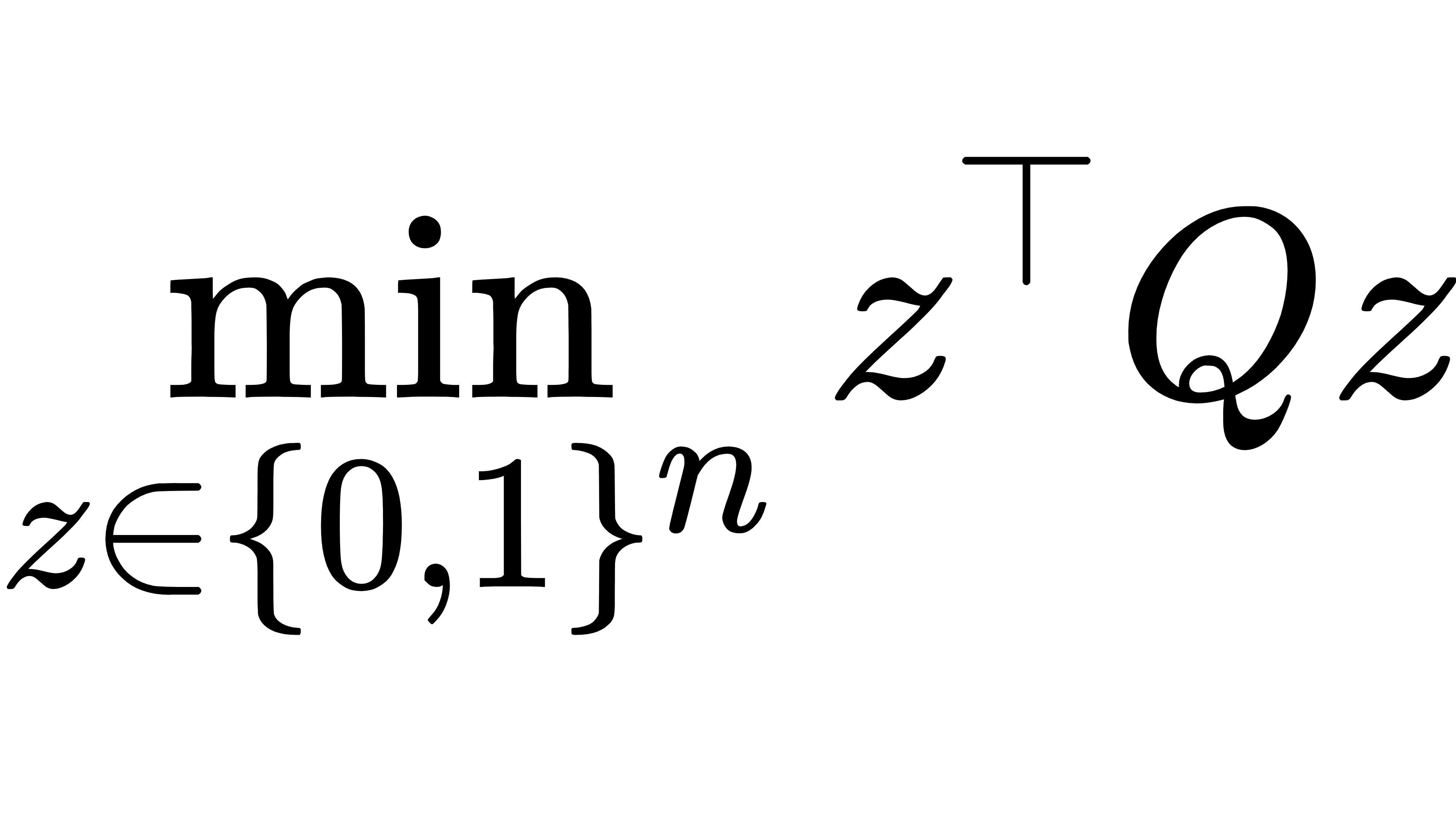
其中Q为实矩阵,n为量子比特数。团队通过 “惩罚因子法” 将 ILP 约束融入目标函数,实现等价转化:
路径选择约束:用惩罚项∑a∈Aωoa||1⊤z−1||2确保每个智能体仅选一条路径,ωoa为足够大的惩罚系数;
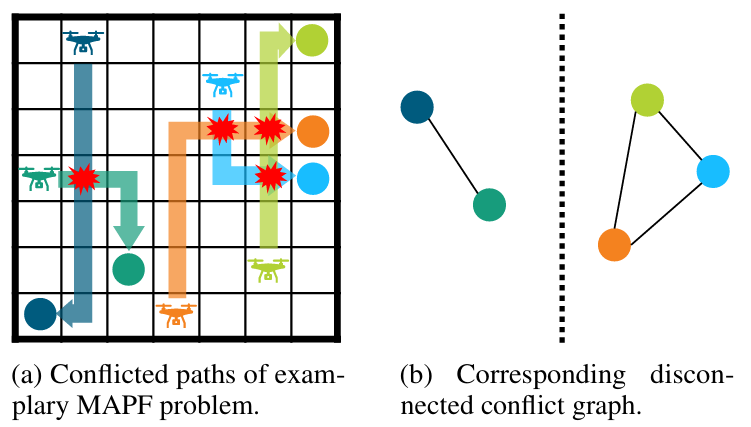
图2 路径冲突图与子问题分解
冲突约束:通过冲突图(Conflict Graph)建模 —— 图中节点为路径,边代表路径间存在冲突,引入惩罚项ωcz⊤Cz(C为冲突图邻接矩阵), penalize 冲突路径组合。
这种转化的关键优势是 “问题分解”:冲突图可能包含多个连通分量,可拆分为独立子问题,大幅减少单个 QUBO 的比特数,适配当前量子硬件的 qubit 限制。
2.3 混合框架:迭代优化逼近最优解
算法采用 “分支 - 切割 - 定价”(BCP)的迭代流程,避免一次性处理所有路径和约束:
1.初始化:为每个智能体生成初始路径(可能存在冲突);
2.分离步骤:检测当前路径集中的冲突,将冲突约束加入问题;
3.定价步骤:为智能体生成新的候选路径,补充到路径集;
4.量子求解:将当前路径集对应的 QUBO 问题提交给量子退火器或经典模拟量子 solver,得到无冲突的路径组合;
5.终止判断:当新增路径无法降低总成本时,停止迭代,输出最优解。
整个过程中,量子计算机负责解决核心的 “路径组合优化”,经典计算机负责路径生成、冲突检测等高效任务,扬长避短发挥各自优势。
三、实验验证:量子算法超越传统方法
团队在 MovingAI 基准数据集上进行了全面测试,对比了两种量子算法(QP 和 QCP)与四种经典算法(BCP、EECBS、LNS2、LaCAM*),核心结果如下:
3.1 性能优势:最优性与效率双突破
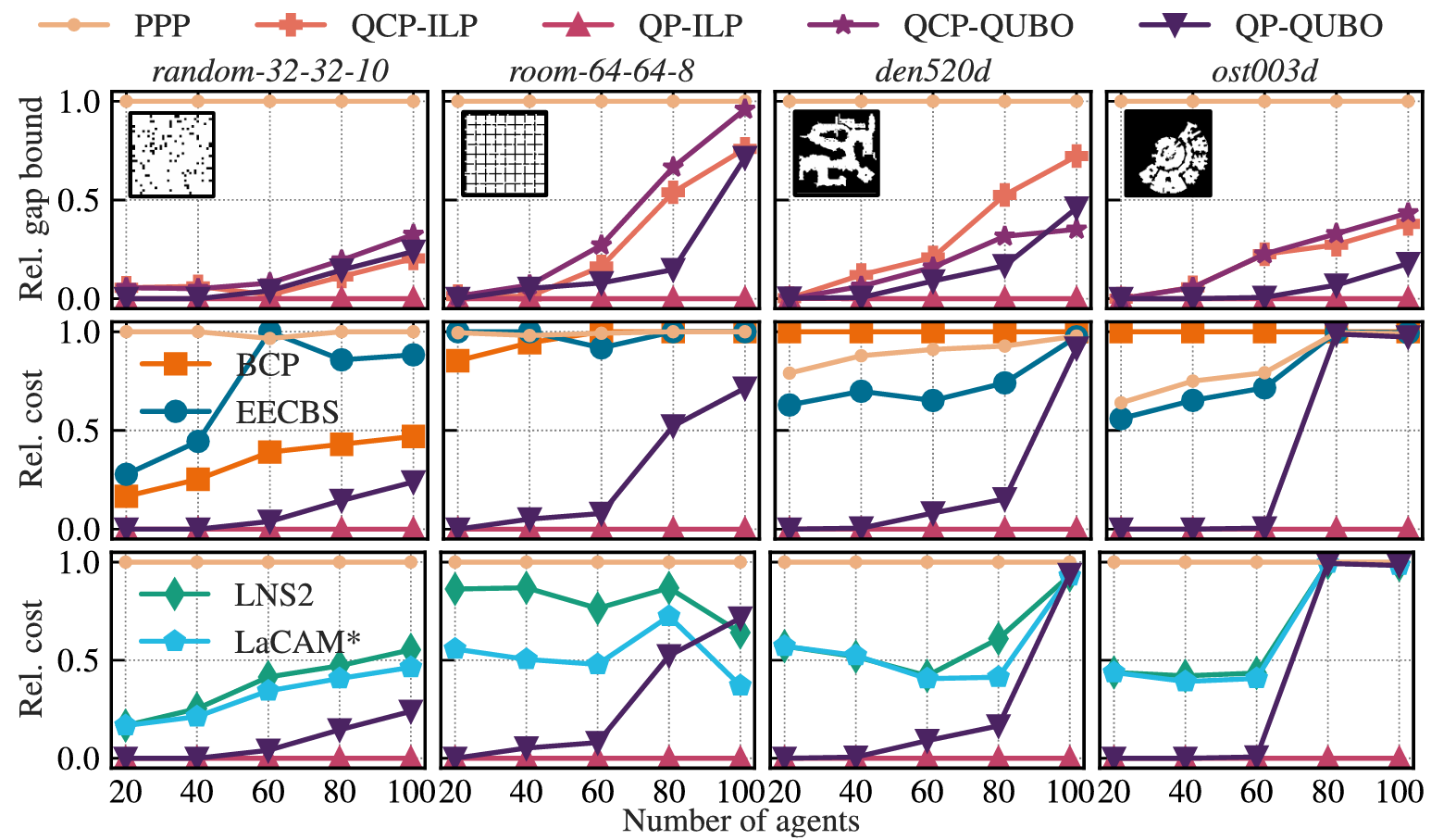
图3 不同算法在 4 种地图上的相对性能对比
最优性领先:量子算法的整数线性规划版本(QP-ILP)几乎总能找到最优解,在 100 个智能体的场景中,总路径成本比次优算法 LNS2 低 5%-15%;
量子求解有效:基于量子退火器的 QUBO 求解版本(QP-QUBO),在多数场景中性能超越 LNS2 和 LaCAM*,部分地图(如 den312d)的路径成本甚至接近最优解;
扩展性更好:当智能体数量从 20 增加到 100 时,量子算法的性能下降幅度远小于传统最优算法,展现出更强的大规模适配能力。
3.2 量子硬件适配:冲突图分解显威力
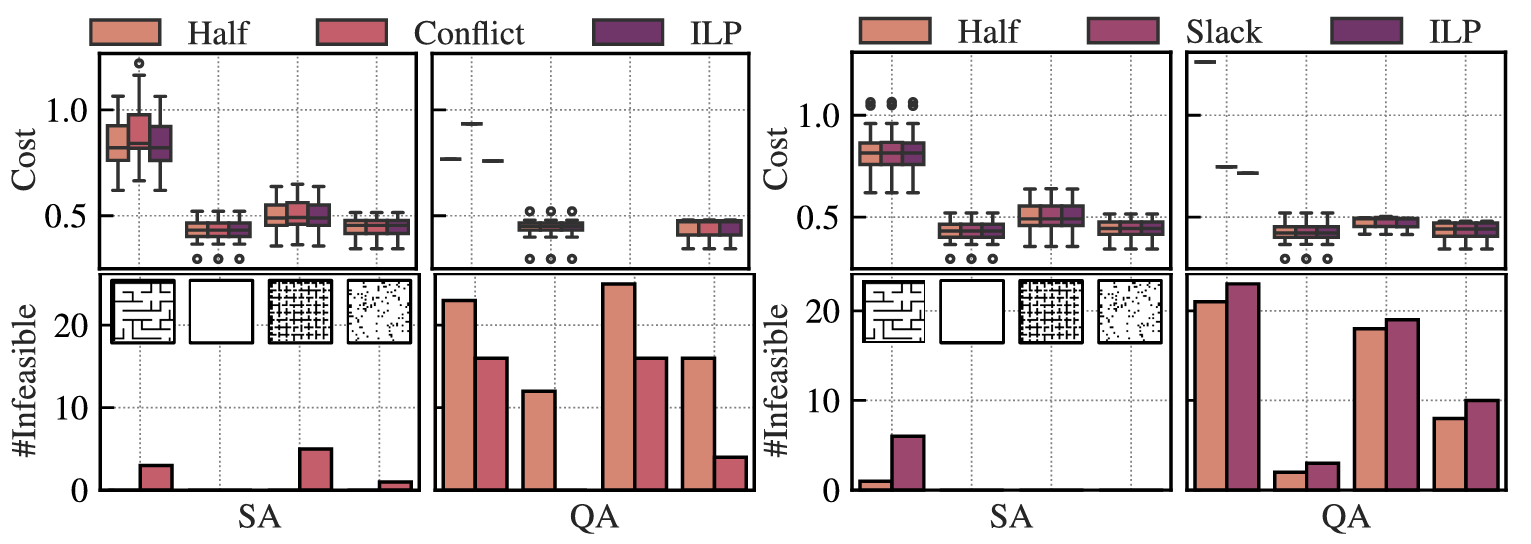
图4 不同 QUBO formulation 的性能对比
实验采用 D-Wave Advantage 量子退火器(5670 个物理 qubit),通过冲突图分解将 QUBO 问题拆分为小尺寸子问题,有效规避了量子硬件的 qubit 数量和连通性限制。结果显示,基于冲突图的 QUBO formulation(CONFLICT)比其他形式(如 SLACK、HALF)更易获得可行解, infeasible 解数量减少 30% 以上。
3.3 工程价值:实时规划潜力
量子退火器求解单个 QUBO 问题的退火时间仅需 20 微秒,即使加上采样和通信开销,整体耗时仍有望满足实时规划需求。这意味着未来数千架无人机协同飞行时,量子算法能快速给出无碰撞航线。
四、核心应用场景
这种混合量子 - 经典 MAPF 算法已具备明确的工程落地前景:
无人机配送:为城市上空的数百架配送无人机规划无碰撞航线,优化配送顺序和飞行路径;
仓库机器人:协调仓库内的 AGV 机器人,避免货架碰撞,提升货物搬运效率;
自动驾驶编队:支持多辆自动驾驶汽车的编队行驶,实现灵活变道、超车时的无碰撞路径规划;
工业机器人协同:在复杂生产线上,为多台机械臂规划协作路径,避免运动干涉。
五、当前挑战与未来方向
尽管表现亮眼,量子 MAPF 仍面临一些待解决的问题:
量子硬件限制:当前 NISQ 时代的量子设备存在噪声和 qubit 数量限制,智能体数量暂时难以突破 100;
QUBO 参数调优:惩罚因子的选择会影响量子求解的精度,需要进一步优化以适应不同场景;
通信开销:量子硬件与经典计算机的通信延迟,可能影响实时规划性能。
未来,随着容错量子计算机的发展、qubit 数量的增加,以及 QUBO formulation 的持续优化,量子 MAPF 算法有望支持数千个智能体的实时路径规划,彻底解决大规模多智能体协同的 “避撞难题”。
六、总结
混合量子 - 经典 MAPF 算法的核心价值,在于将量子计算的并行处理能力与经典算法的工程适配性相结合,首次实现了量子技术在路径规划领域的实用化突破。它不仅解决了传统算法的算力瓶颈,还能提供更优的路径成本,为无人机配送、自动驾驶等大规模多智能体协同场景扫清了关键技术障碍。
随着量子硬件的不断成熟,我们或许很快就能看到:城市上空无人机有序飞行、仓库机器人高效协同、自动驾驶汽车安全编队 —— 这些曾经的 “科幻场景”,将在量子计算的赋能下成为现实。
文章链接:[2501.14568] Hybrid Quantum-Classical Multi-Agent Pathfinding |