
调整惩罚系数
引言
在数学、计算机科学、工程学和经济学等领域,约束是一种条件或限制,规定着变量对象必须满足的特定关系或范围。在优化问题与机器学习任务中,往往会面临复杂多样且数量较多的约束条件,这使得自动确定能满足约束条件的惩罚系数成为关键问题。 例如,在附带约束条件的优化任务里,惩罚系数需被用于目标函数中,对违反约束的行为进行惩罚,从而确保最终求解的结果符合特定条件。需要注意,调整惩罚系数与处理约束问题在本质上是相通的,基于此,我们也为大家梳理了一些调整惩罚系数的实用思路。
首先,我们将给出三种确定惩罚系数的方法——惩罚法(Penalty Method)、有效性下界法以及迭代法。对于惩罚法的相关介绍,可直接参考【处理约束问题】章节;随后将以一代码案例讲解如何在kaiwu SDK中实现自动确定惩罚系数;最后将以JSP(Job Shop Scheduling Problem) 任务调度问题为例讲解如何应用下界法确定各约束的惩罚系数。
有效性下界法确定惩罚系数
当某个离散变量的值变化时,如果在目标函数引起的变化量恒小于在惩罚项引起的变化量,则惩罚项能够被优先满足。通过计算目标函数最大变化量和惩罚项最小变化量的比值,就可以计算合理的惩罚系数。
给定一个QUBO问题目标函数的一般表达式:
(1)目标函数的最大变化量可以通过上界来估计。为了估计目标函数的最大变化量,我们单独考虑某个变量
其中,
同理,当
我们可以取所有变量
(2)下一步是估计惩罚项的最小非零变化量。 惩罚项的最小非零变化量难以准确计算,一种可行的估计方法是对惩罚项中的参数两两计算差值,然后选取其中最小的非零值并取绝对值。假设惩罚项可以表示为
该值反映了惩罚系统的最小分辨能力,也对应了量子退火中的能级间隔。
(3)通过上述对目标函数最大变化量
而对于
其中上标
迭代法确定惩罚系数
使用迭代方法可以避免估计惩罚系数容易不准确的问题,但是迭代求解需要多次求解,花费的时间和计算资源更多。一种简单的方法是通过多次尝试,不断增加没有满足的惩罚系数的权重,从而最终确定合适的惩罚系数。惩罚系数的更新可以使用多种不同的更新方法,比如每次增加一个常数,按
此外,还可以参考增广拉格朗日函数法(ALM)在连续问题上的应用,将ALM改变为适用于离散QUBO问题的方法。首先,将目标函数与约束条件结合,形成拉格朗日函数,对于每个约束,引入拉格朗日乘子;然后在拉格朗日函数中添加惩罚项,这一惩罚项通常是约束违反程度的平方,乘以一个惩罚因子,通过迭代的方式,逐步优化拉格朗日函数。每次迭代中,更新拉格朗日乘子和惩罚因子,以提高对约束的满足程度。该方法通过调整惩罚因子和拉格朗日乘子,逐步逼近最优解,确保在满足约束的同时优化目标函数。
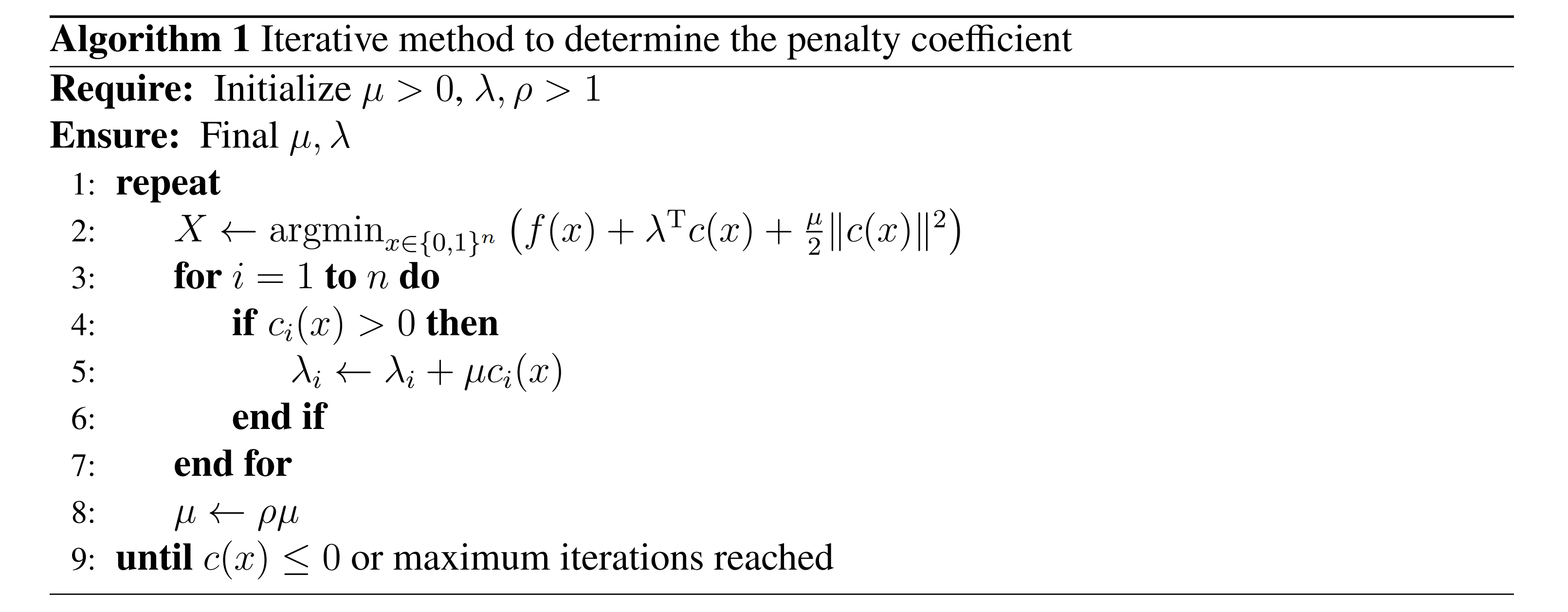 迭代法确定惩罚系数的过程
迭代法确定惩罚系数的过程 (重点)使用Kaiwu SDK自动确定惩罚系数
为了降低使用专用量子计算机求解实际问题的难度,Kaiwu SDK提供了自动调整惩罚系数的函数。
下面这段代码案例通过构建一个简单的带有约束条件的QUBO模型,在满足特定约束的情况下,最大化目标函数的值,并使用SDK中的get_min_penalty自动确定惩罚系数。
优化问题表示为:
使用Kaiwu SDK确定惩罚系数的过程如下所示:
import kaiwu as kw
x = kw.core.ndarray(4, 'x', kw.core.Binary)
cons = (x[0] + x[1] + 2*x[3] - 2)**2 + 2 * x[2]
obj = 3*(x[0] - x[1])**2 - 2 * x[2]
penalty = kw.core.get_min_penalty(obj, cons)
qubo_expr = obj + penalty * cons此外,在Kaiwu SDK中,主要有四种方法对约束的惩罚系数进行自动确定:使用get_min_penalty,get_min_penalty_for_equal_constraint, get_min_penalty_from_min_diff或使用get_min_penalty_from_deltas。
四个函数使用场景上的区别如下表所示:
| 特性 | get_min_penalty | get_min_penalty_for_equal_constraint | get_min_penalty_from_min_diff | get_min_penalty_from_deltas |
|---|---|---|---|---|
| 适用范围 | 任意二次约束 | 仅限线性等式约束 | 已知目标函数上下界的任意约束 | 已知变量翻转增量(Delta)的任意约束 |
| 计算原理 | 定理一:全局变化量分析 | 单比特翻转最坏情况分析 | 基于目标函数上下界估计 | 基于变量Delta信息分析 |
| 计算复杂度 | 低 | 中等 | ||
| 精度保证 | 全局约束优先满足 | 局部最优保证 | 上下界估计保证 | Delta级精细保证 |
| 典型应用场景 | 非线性约束/不等式转换约束 | 任务分配等线性等式约束 | 已知目标函数范围的快速估计场景 | 需要精确分析变量贡献的优化问题 |
更多使用细节,可直接参考kaiwu.core package文档:https://kaiwu-sdk-docs.qboson.com/zh/latest/source/modules/kaiwu.core.html#